Page Not Found
Page not found. Your pixels are in another canvas.

A list of all the posts and pages found on the site. For you robots out there is an XML version available for digesting as well.
Page not found. Your pixels are in another canvas.
About me
Haiyang Jiang, Yonglin Jing, Ning Guo, Weijie Guo, Fang Wan, and Chaoyang Song*. "Lobster-inspired Finger Surface Design for Grasping with Enhanced Robustness." 2021 4th IEEE International Conference on Soft Robotics . doi:10.1109/RoboSoft51838.2021.9479215
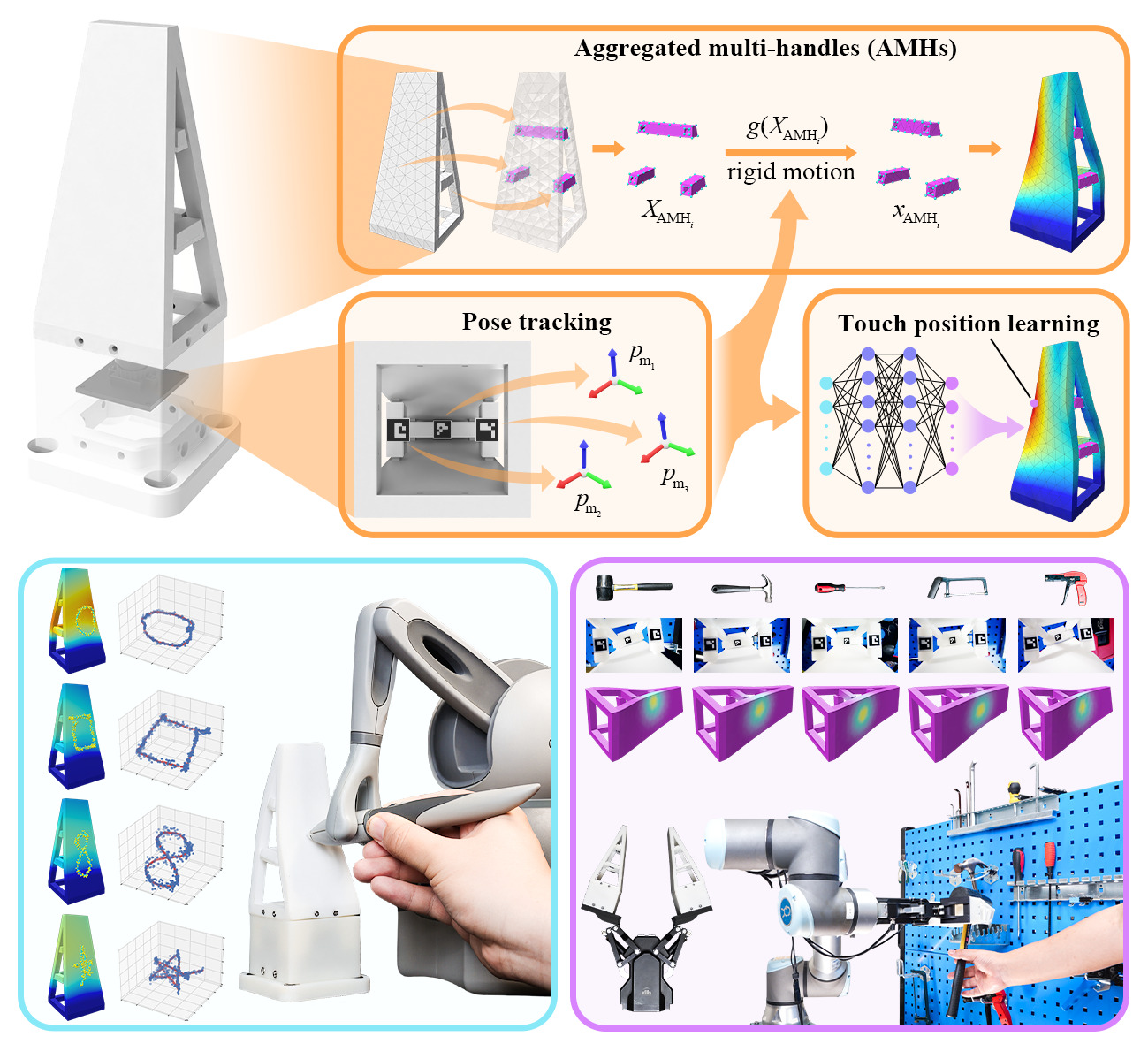
Fang Wan, Xiaobo Liu, Ning Guo, Xudong Han, Feng Tian, Chaoyang Song*. "Visual Learning Towards Soft Robot Force Control using a 3D Metamaterial with Differential Stiffness." in 5th Conference on Robot Learning (CoRL 2021), London, UK
Haiyang Jiang, Xudong Han, Yonglin Jing, Ning Guo, Fang Wan and Chaoyang Song*. "Rigid–Soft Interactive Design of a Lobster-Inspired Finger Surface for Enhanced Grasping Underwater." Frontiers in Robotics and AI, 2021. doi:https://doi.org/10.3389/frobt.2021.787187
Haokun Wang, Xiaobo Liu, Nuofan Qiu, Ning Guo, Fang Wan and Chaoyang Song*. "DeepClaw 2.0: A Data Collection Platform for Learning Human Manipulation." Frontiers in Robotics and AI, 2022. doi: https://doi.org/10.3389/frobt.2022.787291
Xiaobo Liu, Xudong Han, Ning Guo, Fang Wan* and Chaoyang Song*. "Bio-Inspired Proprioceptive Touch of a Soft Finger with Inner-Finger Kinesthetic Perception." Biomimetics,2023. doi:https://doi.org/10.3390/biomimetics8060501
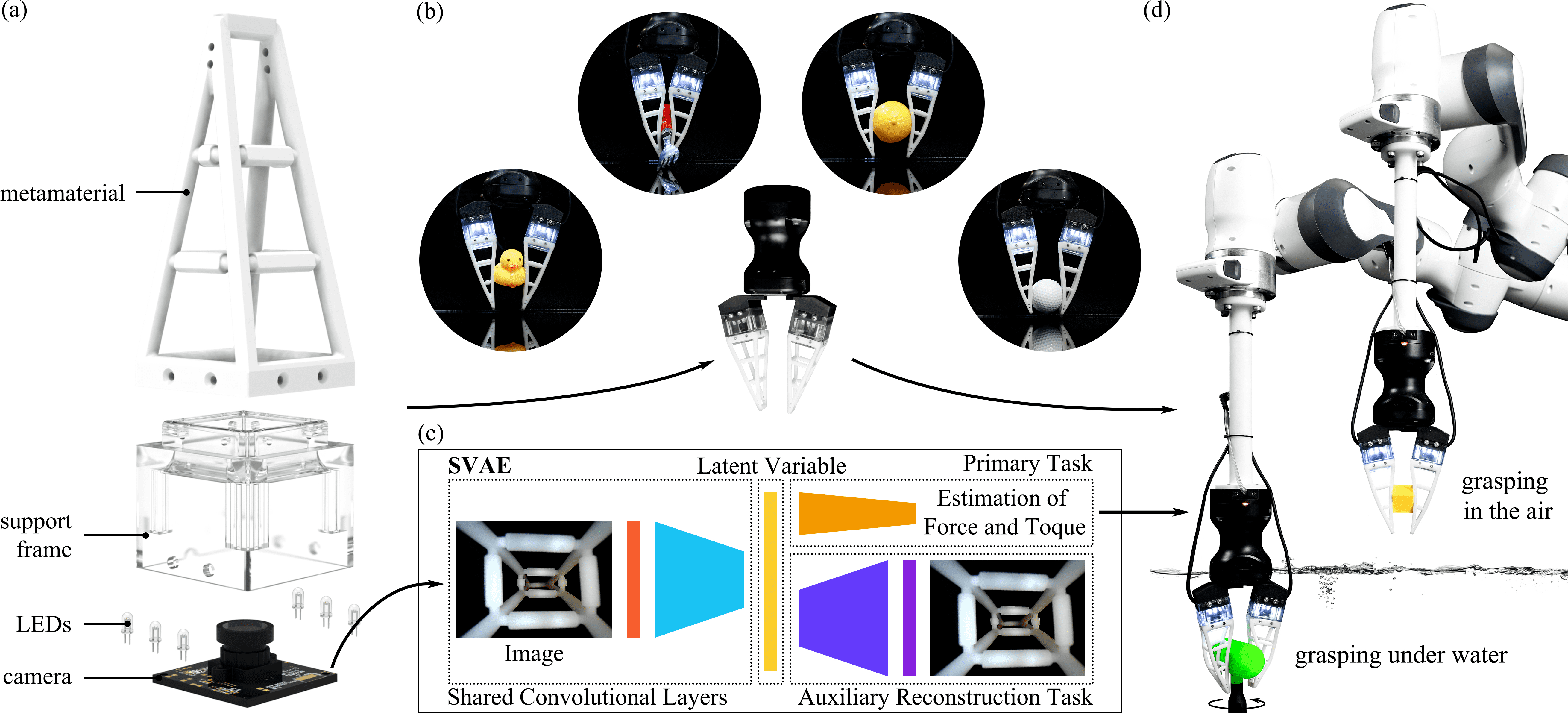
Ning Guo, Xudong Han, Xiaobo Liu, Shuqiao Zhong, Zhiyuan Zhou, Jian Lin, J.S Dai, Fang Wan* and Chaoyang Song*. "Autoencoding a Soft Touch to Learn Grasping from On‐Land to Underwater." Advanced Intelligent Systems. doi:https://doi.org/10.1002/aisy.202300382. Selected as the Front Cover for the January 2024 issue
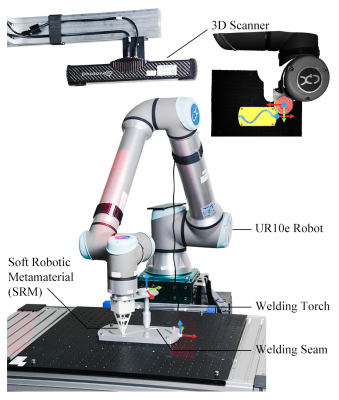
Xudong Han, Ning Guo, Yu Jie, He Wang, Fang Wan* and Chaoyang Song*. "On flange-based 3D hand–eye calibration for soft robotic tactile welding." Measurement. doi:https://doi.org/10.1016/j.measurement.2024.115376.
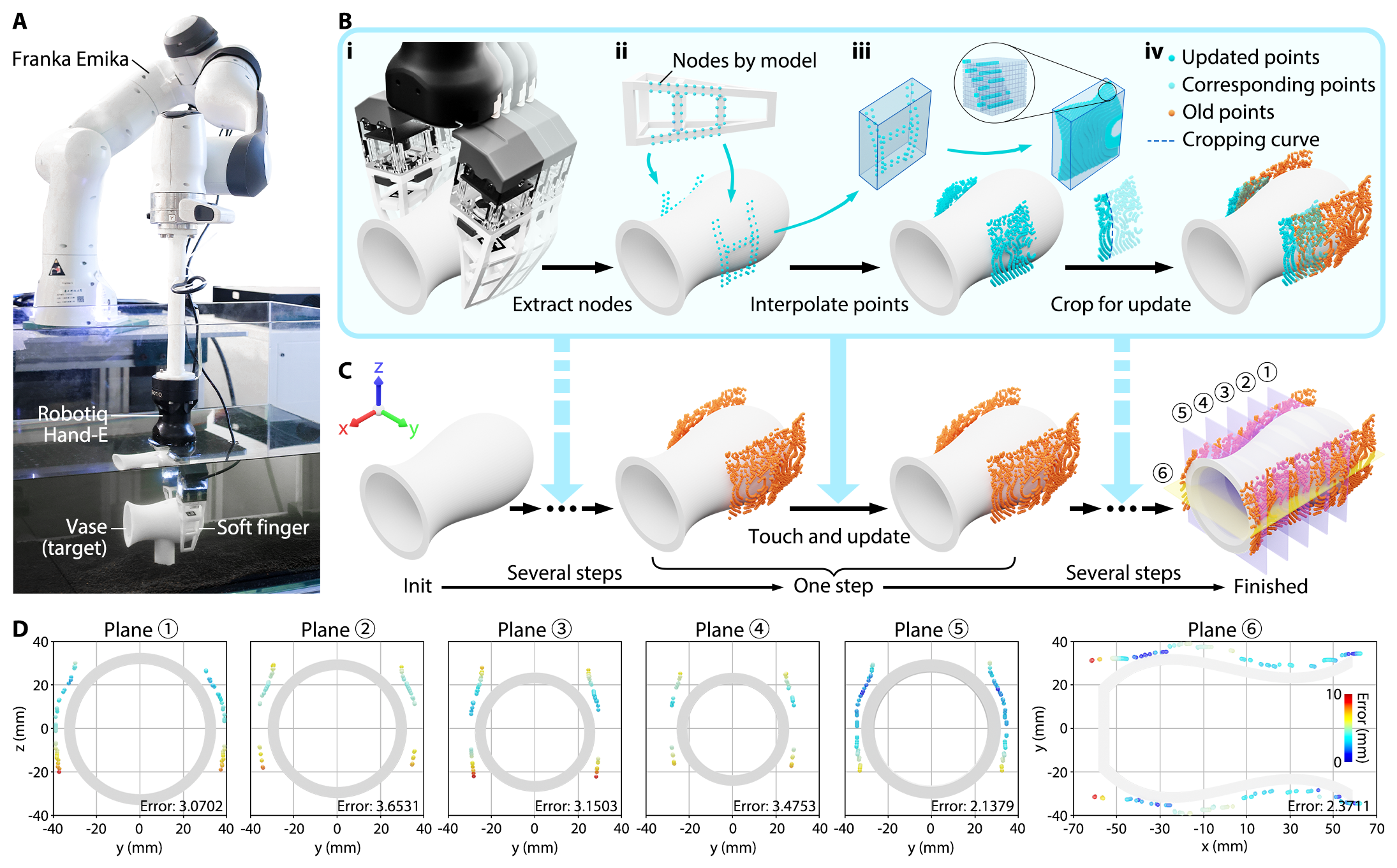
Ning Guo, Xudong Han, Shuqiao Zhong, Zhiyuan Zhou, Jian Lin, Fang Wan* and Chaoyang Song*. "Reconstructing Soft Robotic Touch via In-Finger Vision." Advanced Intelligent Systems. doi:https://doi.org/10.1002/aisy.202400022. Selected as the Cover Article for the September 2024 Issue
Ning Guo, Xudong Han, Xiaobo Liu, Shuqiao Zhong, Zhiyuan Zhou, Jian Lin, J.S Dai, Fang Wan* and Chaoyang Song*. "Proprioceptive State Estimation for Amphibious Tactile Sensing." IEEE Transactions on Robotics. doi:https://doi.org/10.1109/TRO.2024.3463509.